Hi there!
I want to tell you about my experience in creating a joystick for a flight simulator. About a year ago, I started a general purpose joystick project which would be well suited for different flight simulators and have the following properties.
- Compact size so that it can be used with a laptop and any computer on any desk
- High precision and good ergonomics
- Light weight
As a result of my research and experimentation, this joystick has emerged with the following key features:
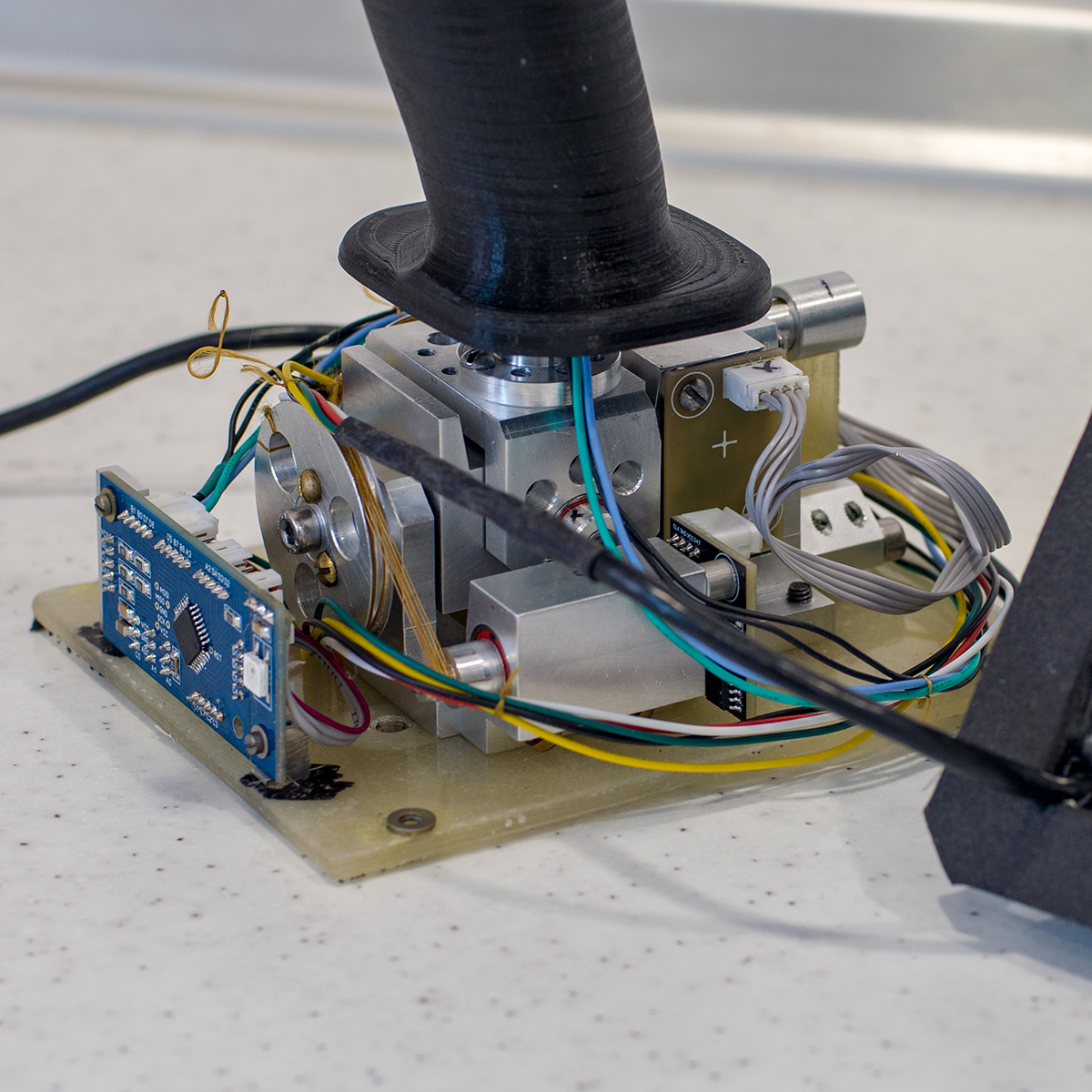
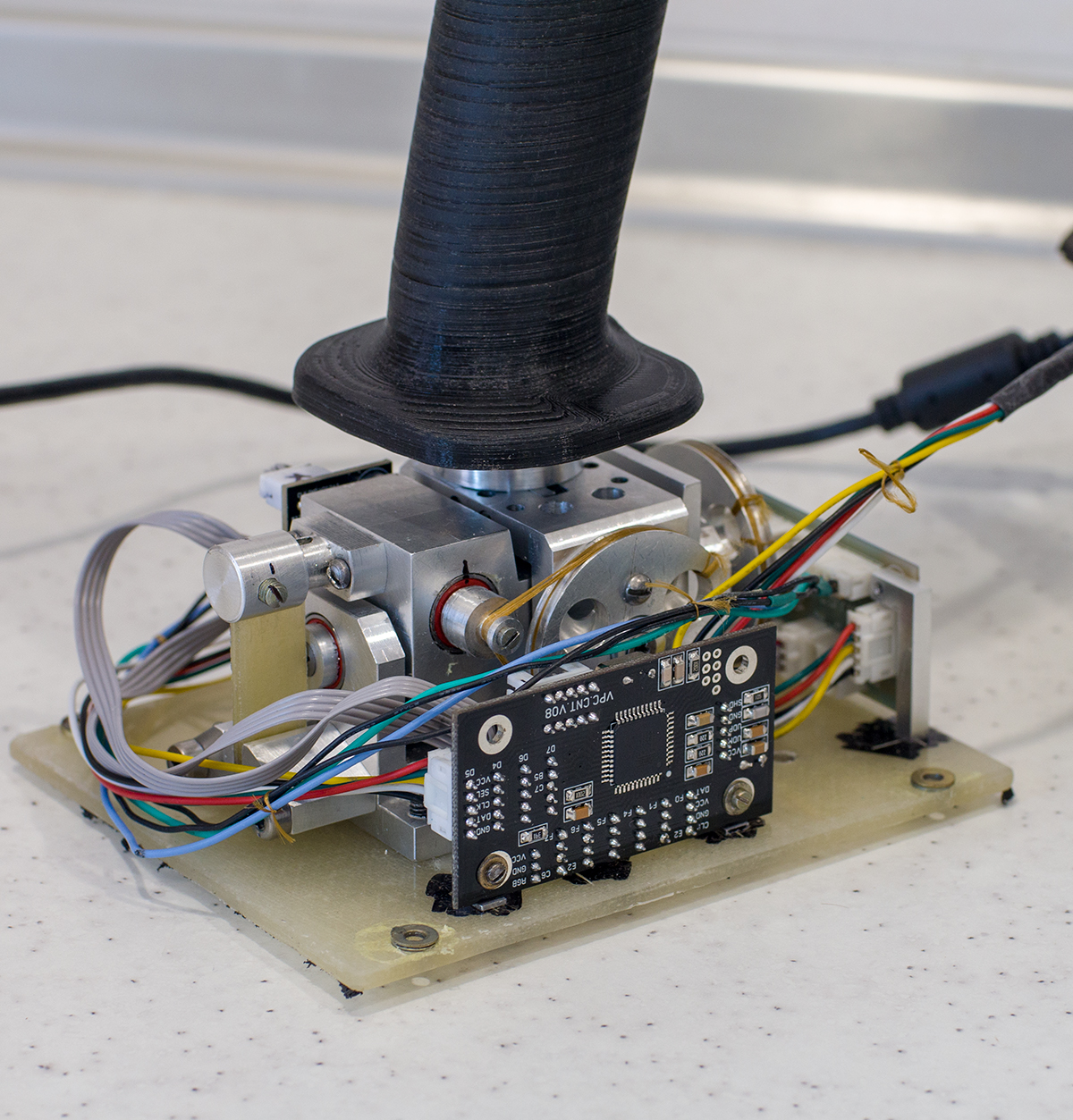
Composite springs and belt gears for sensors.
It should be noted that until the first time I turned on my joystick, I didn’t like helicopters in flight simulators. Those joysticks that I used before did not give such quality control and I just did not get pleasure from flying.
It should be noted that until the first time I turned on my joystick, I didn’t like helicopters in flight simulators. Those joysticks that I used before did not provide such high-quality control and I just did not get pleasure from flying.
Currently, the joystick project is already close to completion and looks like this.
The final look will most likely be like this
I named the joystick “microJ” not only because of its small size, but also because the joystick handle has a small range of angular movements, only 20° per axis.But at the same time, it has a very high digital resolution as it uses the full range (180°) of the TLE5501 sensor.
And an example of using the joystick in X-Plane 11.41
Тестирование джойстика microJ 20.07.2020 - YouTube
another example with landing on a steep slope
X-Plane 11.41. Hughes 500D и немного аэробатики - YouTube
This video shows another joystick prototype named the MicroT, this is the throttle that I am using like collective (very sensitive). Startup procedure and a little bit of hovering, trim using ang physical wing sweep axis
Прототипы РУДа и джойстика с композитной загрузкой. 21042020 - YouTube




I hope this information will be useful for the community.